1.TCP 报文头结构
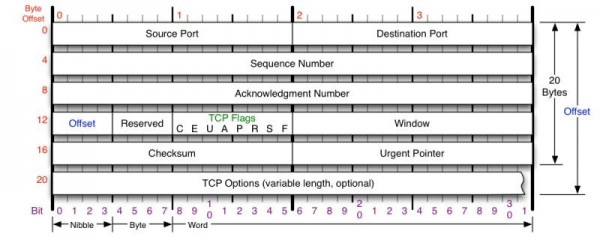
2.报文头各个部分说明
2.1.Source Port和Destination Port:
分别占用16位,表示源端口号和目的端口号;用于区别主机中的不同进程, 而IP地址是用来区分不同的主机的,源端口号和目的端口号配合上IP首部中的源IP地址和目的IP地址就能唯一 的确定一个TCP连接;
2.2.Sequence Number:
用来标识从TCP发端向TCP收端发送的数据字节流,它表示在这个报文段中的的第一个数据 字节在数据流中的序号;主要用来解决网络报乱序的问题;
2.3.Acknowledgment Number:
32位确认序列号包含发送确认的一端所期望收到的下一个序号,因此,确认序号应 当是上次已成功收到数据字节序号加1。不过,只有当标志位中的ACK标志(下面介绍)为1时该确认序列号的字 段才有效。主要用来解决不丢包的问题;
2.4.Offset:
给出首部中32 bit字的数目,需要这个值是因为任选字段的长度是可变的。这个字段占4bit(最多能 表示15个32bit的的字,即4*15=60个字节的首部长度),因此TCP最多有60字节的首部。然而,没有任选字段, 正常的长度是20字节;
2.5.TCP Flags:
TCP首部中有6个标志比特,它们中的多个可同时被设置为1,主要是用于操控TCP的状态机的,依次 为URG,ACK,PSH,RST,SYN,FIN。每个标志位的意思如下:
2.6.URG:
此标志表示TCP包的紧急指针域(后面马上就要说到)有效,用来保证TCP连接不被中断,并且督促 中间层设备要尽快处理这些数据;
2.7.ACK:
此标志表示应答域有效,就是说前面所说的TCP应答号将会包含在TCP数据包中;有两个取值:0和1, 为1的时候表示应答域有效,反之为0;
2.8.PSH:
这个标志位表示Push操作。所谓Push操作就是指在数据包到达接收端以后,立即传送给应用程序, 而不是在缓冲区中排队;
2.9.RST:
这个标志表示连接复位请求。用来复位那些产生错误的连接,也被用来拒绝错误和非法的数据包;
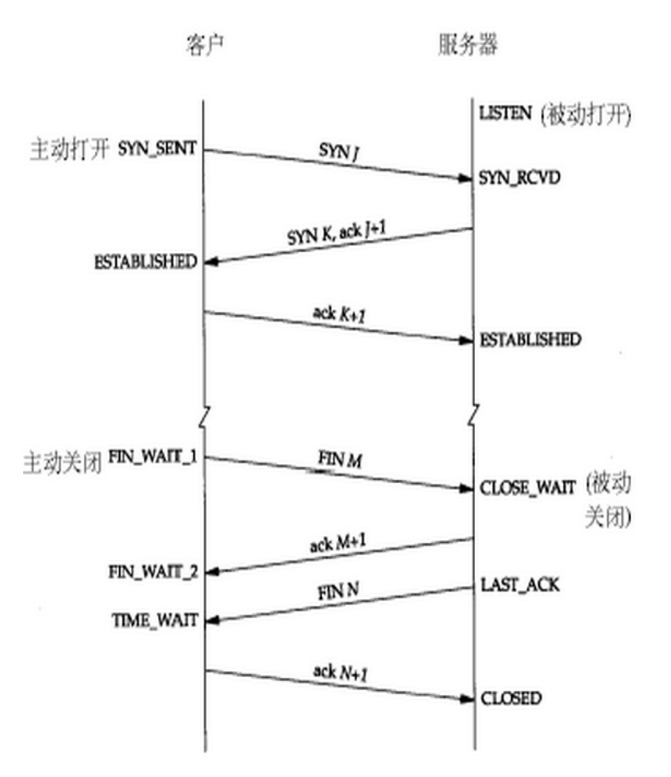
3.0.SYN:
表示同步序号,用来建立连接。SYN标志位和ACK标志位搭配使用,当连接请求的时候,SYN=1, ACK=0;连接被响应的时候,SYN=1,ACK=1;这个标志的数据包经常被用来进行端口扫描。扫描者发送 一个只有SYN的数据包,如果对方主机响应了一个数据包回来 ,就表明这台主机存在这个端口;但是由于这 种扫描方式只是进行TCP三次握手的第一次握手,因此这种扫描的成功表示被扫描的机器不很安全,一台安全 的主机将会强制要求一个连接严格的进行TCP的三次握手;
3.1.FIN:
表示发送端已经达到数据末尾,也就是说双方的数据传送完成,没有数据可以传送了,发送FIN标志 位的TCP数据包后,连接将被断开。这个标志的数据包也经常被用于进行端口扫描。
3.2.Window:
窗口大小,也就是有名的滑动窗口。